Multi-agent system for planning coordinated actions of swarms of unmanned aerial vehicles (UAV)
Purpose
The system is aimed at planning and preparation of flight missions for coordinated UAV swarms and real-time UAV swarm management.
Swarm of Drones allows for managing united swarms of unmanned aerial vehicles which can function both autonomously and under operators’ control.
Planning and management take place in real time, taking into account peculiarities of executed tasks. Besides, there is the possibility of adaptive rescheduling in the process of task execution if the environment changes.
Expected Implementation Results
Swarm of Drones helps users:
- perform intelligent multi-criteria planning of task execution under conditions of high uncertainty;
- calculate routes of UAVs taking into account relief of the area and tactical environment objects;
- prepare flight missions for autonomous UAVs in automatic mode;
- determine the order of coordinated actions and form flight missions for a swarm of UAVs according to quality criteria assigned by the user (safety, guaranteed execution of all tasks, optimal use of the existing resources and equipment, etc.);
- correct the assigned flight missions (and roles of each UAV) in the process of their execution taking into account current toolsets and their characteristics in real time;
- solve conflicts in the process of interaction between operators and UAV swarm;
- receive input data (about tactical environment) from external systems or assign and change them manually, by operator, for efficient planning and management;
- model the process of task execution in order to analyze the rate and quality of their execution and to calculate the demand in resources (UAVs, equipment).
Using Swarm of Drones, it is possible to:
- reduce cost of work and task execution time;
- reduce expenses for operation of UAV fleet (by up to 50%) due to optimization of load of vehicles;
- calculate the quantity of resources needed and optimize the structure of UAV fleet;
- mitigate risks of mistakes in flight mission planning;
- mitigate risks of mistakes in manual UAV control due to autonomous task execution;
- control the process of mission execution in real time, and switch to manual control of vehicles if necessary;
- increase efficiency of managerial decision making.
Application
Swarm of Drones can be applied to solve different types of missions carried out by UAV swarms, including:
- Reconnaissance and exploration of an area;
- Monitoring of the state of industrial objects and their protection;
- Maintaining security at public events;
- Participation in search and rescue operations in places of emergency situations;
- Quick and effective deployment of telecommunication network over a location area;
- Delivery to distant hard-to-reach areas;
- Digital modeling of areas and 3-D modeling of buildings.
The system can be integrated with the existing systems for preparation of flight missions and can be used in the existing software and hardware UAV complexes. Missions for UAV swarms can be assigned both by operator manually and by external systems. On entry, the system receives a set of data describing tactical environment in the area of task execution and a set of missions (goals).
At the output, Swarm of Drones gives the user the final plan (description of coordinated actions) corresponding to the assigned criteria.
Software components of the system can be flexibly changed, modified and adapted for extension of tasks which are collectively executed by UAV swarms. Addition of new types of tasks is possible without fundamental modification of the system due to the use of ontology – knowledge base describing relations of real world objects.
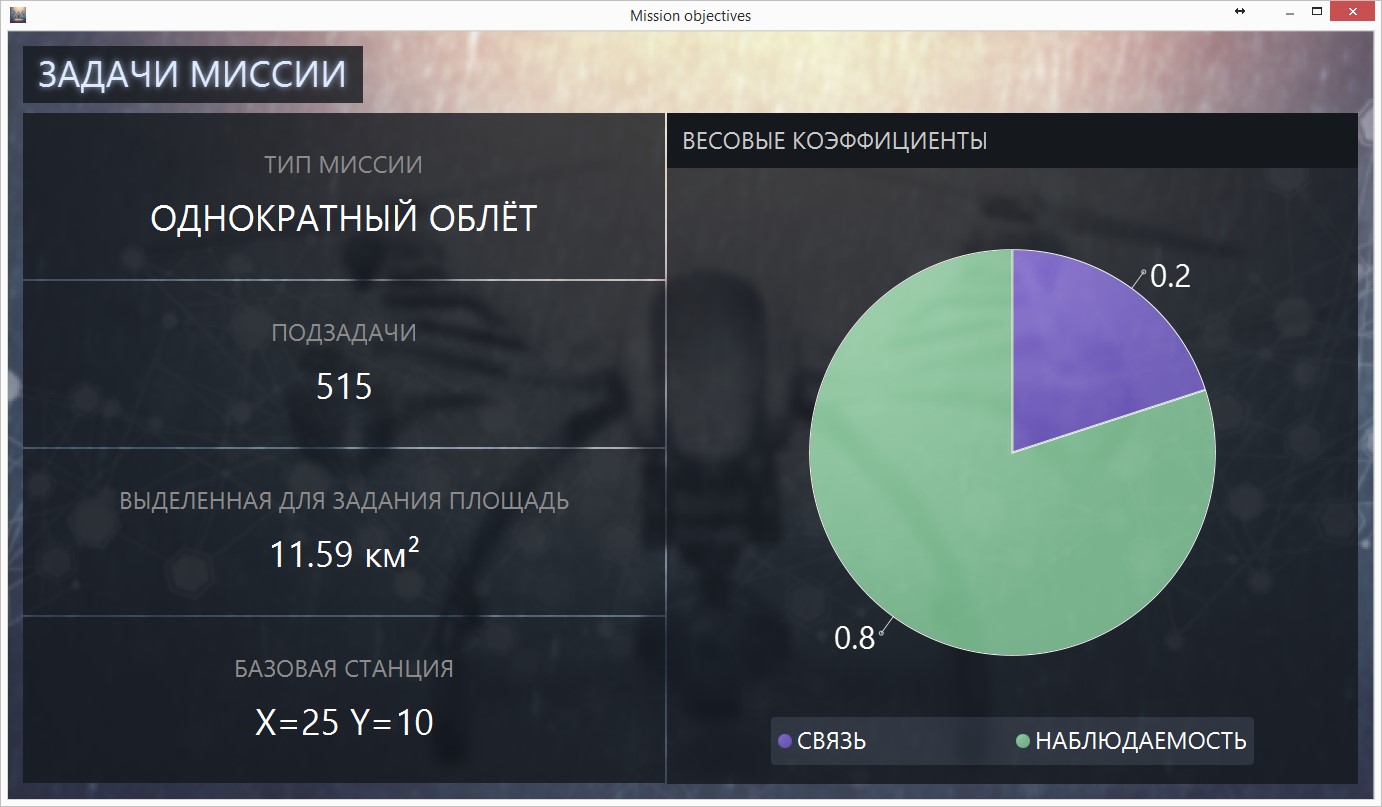
Methods of multi-agent planning used in the system Swarm of Drones allow for simultaneous accounting of several criteria that influence the quality of mission execution, such as:
- safety of flight operations;
- guaranteed task execution;
- method (quality) of task execution;
- speed of task execution;
- optimization (minimization) of using available resources and equipment, etc.
The main users of Swarm of Drones are operators who can work with the system both alone and together. Due to the use of Swarm of Drones, operators do not need to perform continuous manual control of UAVs, they are supposed to do goal-setting and task execution control instead. But the possibility of UAV manual control is still available – operators can switch UAV swarms to the manual control mode at any time.
Operator
- goal setting
- determination of conditions and restrictions
- determination of criteria values
- receiving ready flight plans
- control of task execution in autonomous mode
- manual control of one or several UAVs (if necessary).
Functionality
Flight mission planning
Swarm of Drones allows for planning of flight missions both for single UAVs and for groups of vehicles which execute common tasks together.
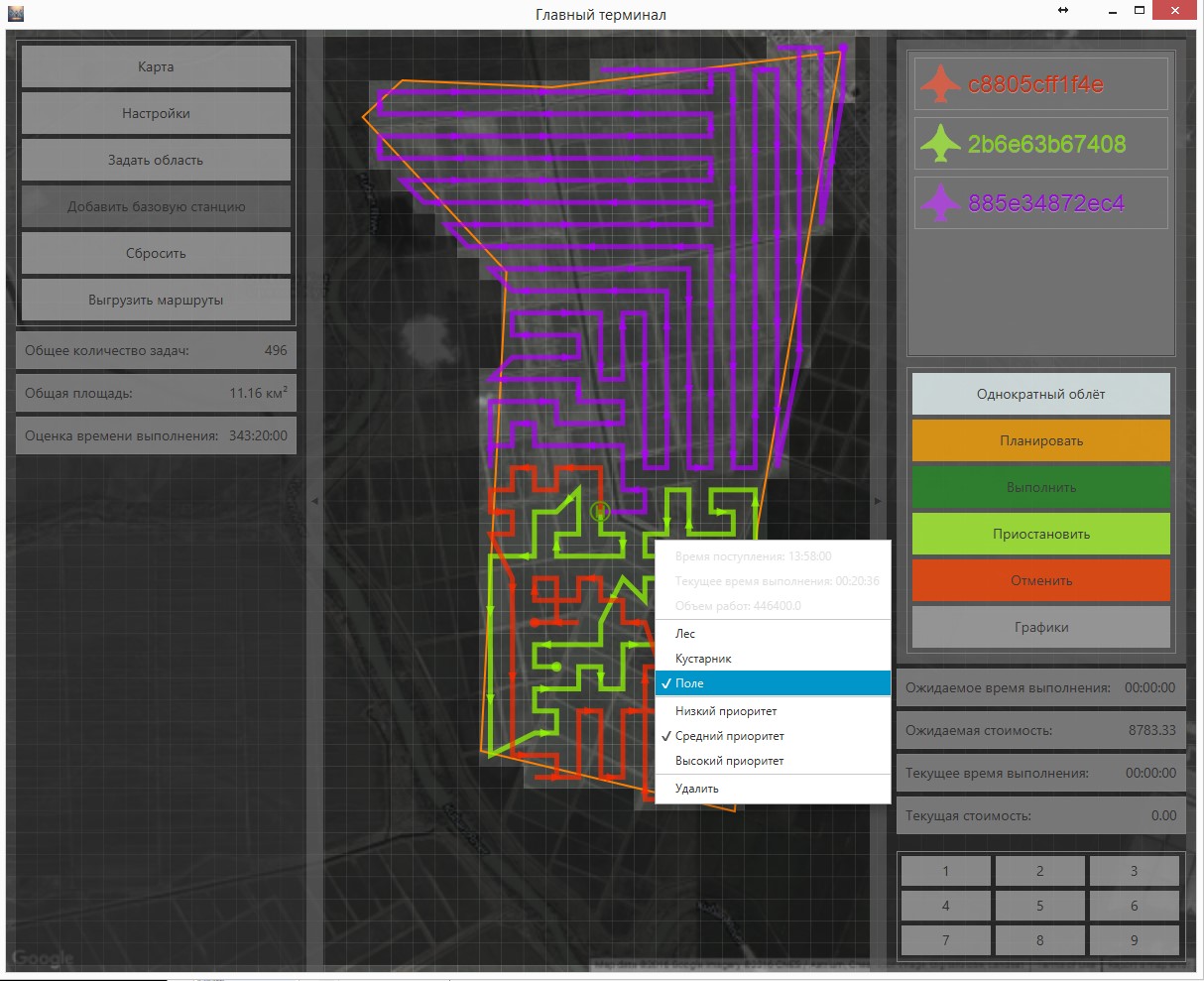
Using methods of multi-criteria multi-agent planning enables the system to form flight missions in difficult situations with a lot of factors (dozens and hundreds) which simultaneously influence the decision-making process.
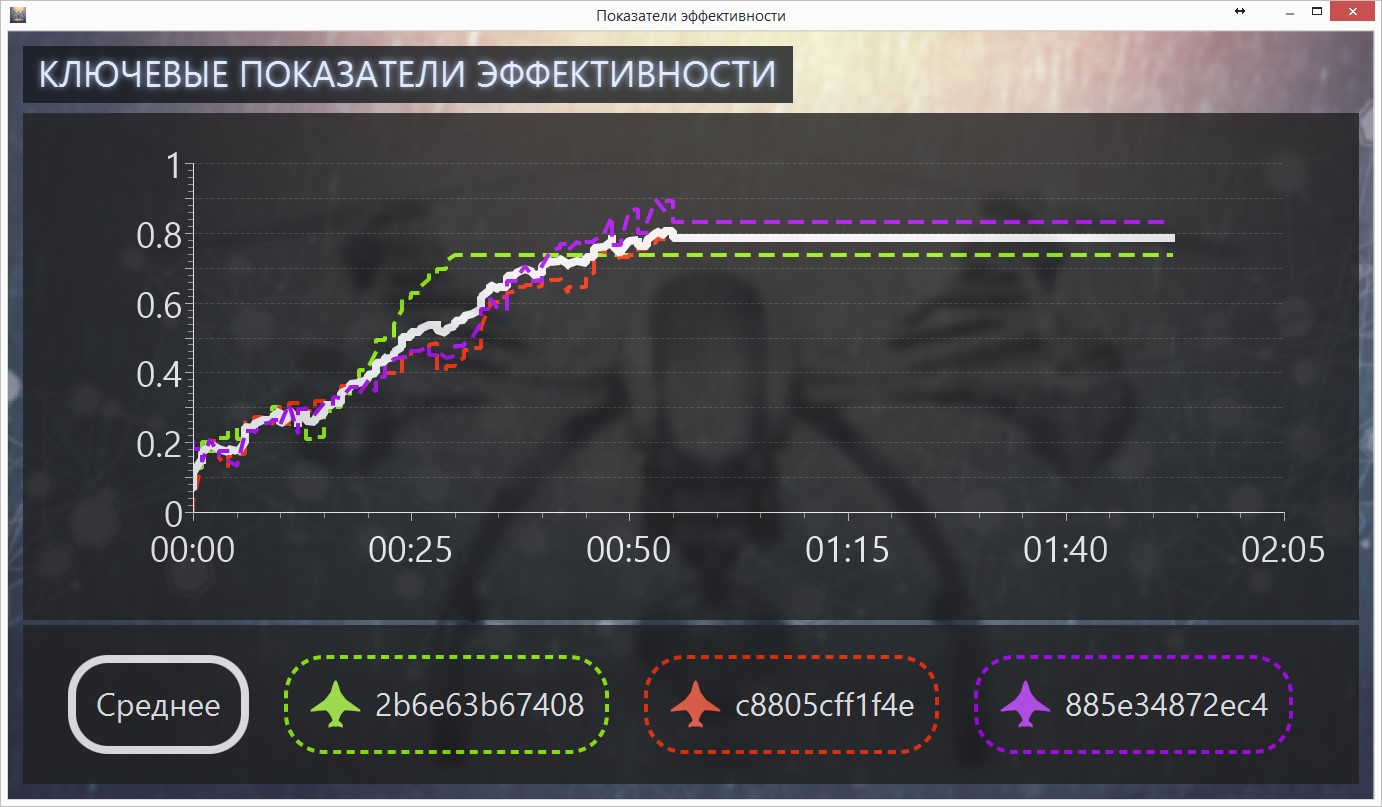
Modeling of mission execution processes
To estimate expenditures of time and resources required for execution of assigned missions and to obtain prompt information, a modeling function is realized in the system.
Operator can receive action plan of a swarm, time and cost calculations by introducing input data (task conditions, number and models of UAVs within the swarm) and launching the modeling process.
The received information can be used for planning of current activity (determination of observation area borders, scheduling) as well as for planning of UAV swarm structure (the quantity of UAVs and detachable equipment) in the process of their forming and modernization.

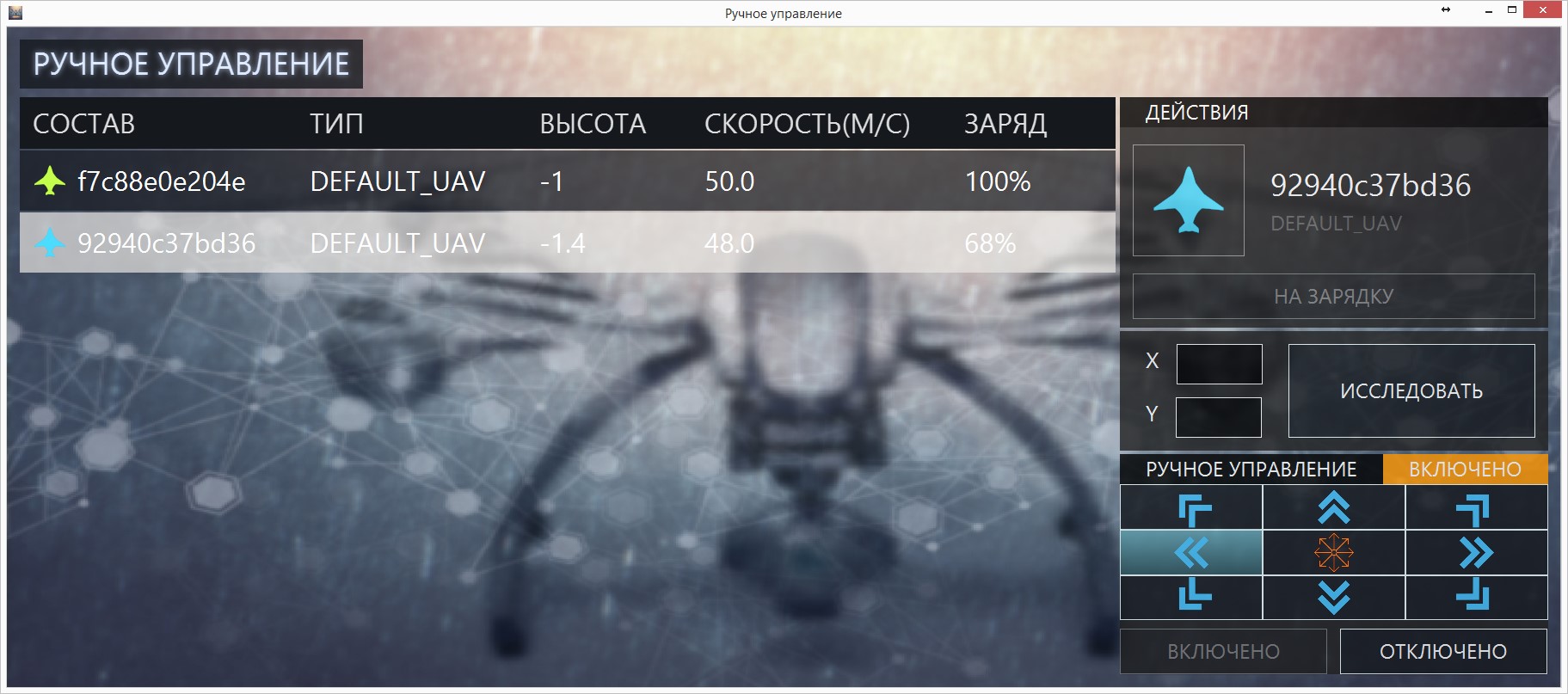
Monitoring of mission execution and manual control
Operators can track work process and the state of certain vehicles of a swarm in real time.
If necessary, operators can switch separate UAVs or the whole swarm to the manual control mode.
Rearrangement of plans in case of changes of execution conditions
If external conditions change (for example, loss of connection with UAV, change of goals and targets of a mission), flight missions of separate vehicles of a swarm are rearranged in an adaptive manner, according to events in real time.

Thus, task re-distribution between UAVs is performed via negotiations of the corresponding software agents.
Advantages
- Relevant plans of flight missions capable of adapting to changes of environment in real time.
- Efficient tool for control of coordinated actions of united UAV swarms
- Great possibilities of integration with systems for flight mission preparation as well as with analytical and informational systems
- High quality multi-criteria planning and management in dynamically changing environment
- Accounting peculiarities of the execution process of various tasks of UAVs
- Possibility of modeling and forecasting of task execution process for prompt acquisition of management information
Swarm of Drones has great possibilities of integration with the existing systems for flight mission preparation and software and hardware UAV complexes.
Modeling performed by Swarm of Drones enables designers to:
- Determine optimal configurations of UAV swarms to perform tasks of different types
- Forecast possible problems of working with UAVs (connected with their technical features and restrictions) when executing various types of tasks
- Decrease expenses (temporal and financial) on preparation and performance of flight tests
- Mitigate risks of damage or loss of new equipment
- Reduce time for preparation of flight missions for autonomous UAVs by 80%
- Prepare equipment for test flights of UAVs autonomously for collective execution of missions.